This document outlines the integration between the RF QUANTUM SCYTHE’s Tactical Operations Center and Google Glass Enterprise Edition 2 for signal geolocation.
The integration enables field operators wearing Google Glass to:
– Receive real-time signal detection alerts
– View directional indicators to located signal sources
– Access threat classification data
– Get distance and bearing information to signals of interest
Architecture
The Glass integration consists of the following components:
1. TacticalOpsCenter Core – Central coordination module
2. Glass Integration Module – WebSocket server for Glass communication
3. Glass HUD Visualization – Overlays for signal visualization
4. Geolocation Engine – For triangulating signal sources
Signal Geolocation Process
1. Signal Detection & Tracking
When a signal is detected by the Signal Intelligence system, it is forwarded to the Tactical Operations Center, which can mark it as a “signal of interest” for tracking:
```python
tactical_ops.submit_command({
"action": "track_signal",
"signal_id": "signal_id",
"priority": "high",
"reason": "Suspicious MWFL detection"
})
```2. Sensor Data Collection
Multiple sensor readings are collected, each containing:
– Sensor position (latitude, longitude, elevation)
– Signal bearing (direction from sensor)
– Signal strength
– Timestamp
3. Triangulation
The Tactical Operations Center processes these sensor readings to determine the signal’s position:
```python
tactical_ops.submit_command({
"action": "geolocate_signal",
"signal_id": "signal_id",
"sensor_readings": sensor_readings,
"confidence": 0.85
})
```The triangulation algorithm calculates the most likely position based on the intersection of bearings from multiple sensors.
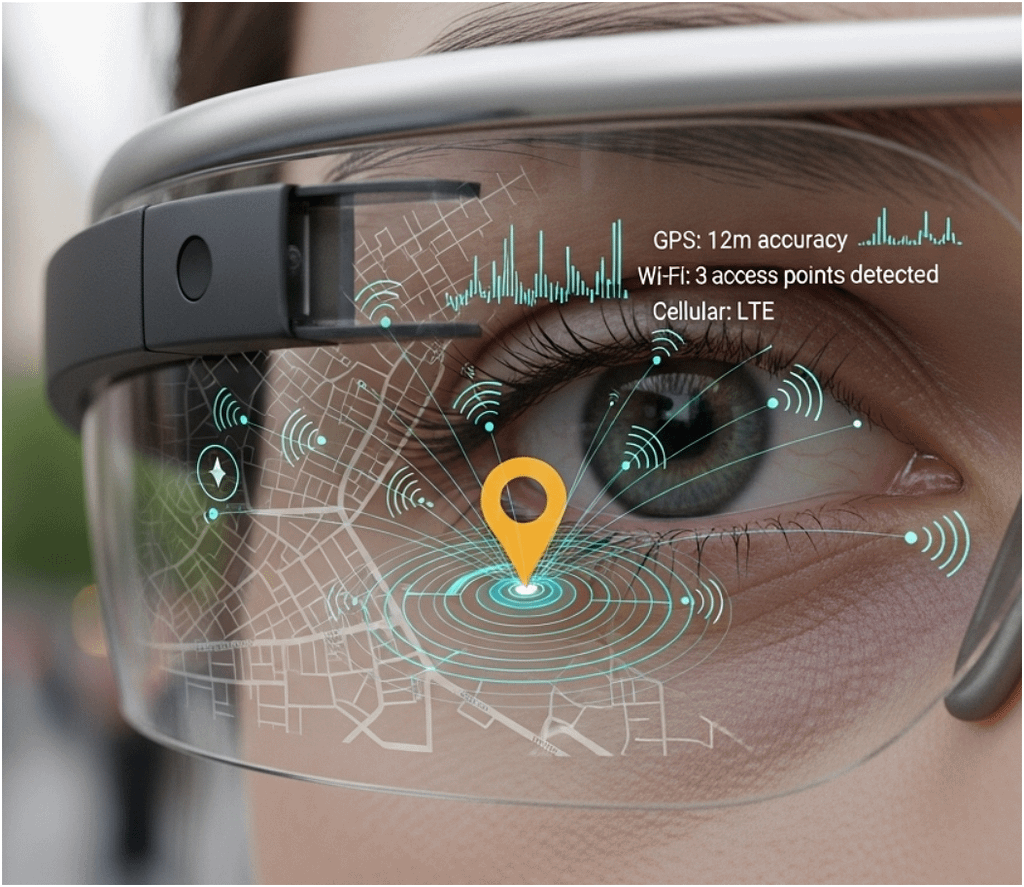
4. Glass Visualization
Once a signal is geolocated, the information is pushed to connected Glass devices:
1. Position (latitude, longitude, elevation)
2. Bearing from operator’s current position
3. Distance from operator
4. Signal classification and priority
Integration APIs
TacticalOpsCenter API
New commands and methods added:
- `_handle_geolocate_signal(command)` - Process geolocation requests
- `_triangulate_signal(sensor_readings)` - Calculate signal position
- `_handle_push_to_glass(command)` - Push data to Glass visualization
- `_push_geolocation_to_glass(signal_id, position, priority)` - Format and queue geolocation for Glass
- `_glass_visualization_loop()` - Process visualization queue
- `_calculate_bearing_to_position(position)` - Calculate bearing to signal
- `_calculate_distance_to_position(position)` - Calculate distance to signal
- `get_signals_of_interest(include_details, include_geolocation)` - Get signals with geolocationGlass Integration API
The `glass_integration.py` module provides:
– `send_visualization(viz_type, data, priority)` – Send visualization data to Glass
– WebSocket server for real-time communication with Glass devices
– Caching of visualizations for reconnecting devices
– Battery-aware visualization complexity
WebSocket Protocol
Glass devices connect to the WebSocket server and receive visualization updates in JSON format:
```json
{
"type": "signal_location",
"data": {
"signal_id": "signal_002",
"position": {
"lat": 37.775,
"lng": -122.418,
"elevation": 12.33,
"accuracy": 15
},
"priority": "high",
"bearing": 127.5,
"distance": 450.8,
"timestamp": 1627839942.68
},
"priority": "high",
"timestamp": 1627839942.68
}
```Running the Demo
A demonstration script is included to showcase the geolocation capabilities:
“`bash
python TacticalOpsCenter/demo.py –geolocation
“`
This will:
1. Start a WebSocket server for Glass connections
2. Simulate signal detection events
3. Track a high-power MWFL signal
4. Perform geolocation using simulated sensor data
5. Push visualization to connected Glass devices
Glass UI Overlay
The Glass UI displays:
1. **Directional Indicator**: An arrow pointing toward the signal source
2. **Distance**: Distance to the signal in meters
3. **Signal Type**: Classification of the detected signal
4. **Threat Level**: Color-coded based on priority (green, yellow, orange, red)
5. **Signal Strength**: Visual indicator of relative signal strength
Integration with Existing Components
This integration works with the previously developed:
– `mwfl_glass_overlay.js` – For rendering overlays
– `glass_payload_export.py` – For exporting payloads to Glass
– `rydberg_atom_sensor.py` – For quantum-locked detection
Next Steps
1. Implement multi-signal tracking and prioritization
2. Add confidence ellipses for position uncertainty
3. Integrate with map overlays for spatial awareness
4. Add signal prediction for mobile or intermittent signals